

六自由度精密调整对位平台开发
机械工程
资助企业:
 上海骄成超声波技术股份有限公司
上海骄成超声波技术股份有限公司
资助年份: 2026
企业导师: 陈小亮

指导教师: 赵勇
项目成员: 饶睿宇 付玮琦
 项目海报
项目海报


 项目视频
项目视频
 项目简介
项目简介
项目概述
半导体芯片封装等高端制造领域对微米级六自由度位姿调整需求迫切,传统串联机构存在刚度低、误差累积、动态响应差等不足。
本项目采用6‑UPS(虎克铰‑移动副‑球铰)构型,设计并搭建一套以伺服电机驱动的六自由度精密并联平台。定平台直径Φ150 mm、动平台直径Φ80 mm、初始高度120 mm,目标运动范围为X/Y向±1.5 mm、Z向±0.5 mm、Rx/Ry向±3°、Rz向±5°,负载能力覆盖2 kg拉力至30 kg压力。
项目从机构设计、运动学仿真、CAE校核到控制系统开发与样机调试,形成完整技术体系。
项目目标
1、完成六自由度平台机构设计与仿真:
(1)确定6‑UPS构型并完成自由度计算;
(2)建立逆向运动学模型,通过UG仿真确定驱动行程不小于10 mm;
(3)完成定平台、动平台、驱动支链及铰链的全参数化三维建模与虚拟装配;
(4)通过ANSYS静力学分析校核30 kg负载下的强度与刚度。
2、完成控制系统开发与样机调试:
(1)采用集中式控制架构,选用固高GTS‑800运动控制卡及配套硬件;
(2)开发基于C#/WinForms的三层架构上位机软件,实现逆运动学实时解算与多轴同步控制;
(3)完成样机机械装配与电气集成,实现单轴点动及六轴同步点位运动。
3、完成负载性能验证:
(1)设计运动行程测试与负载测试方案;
(2)验证2 kg至30 kg负载范围内平台的位姿保持与运动平稳性。
项目成果
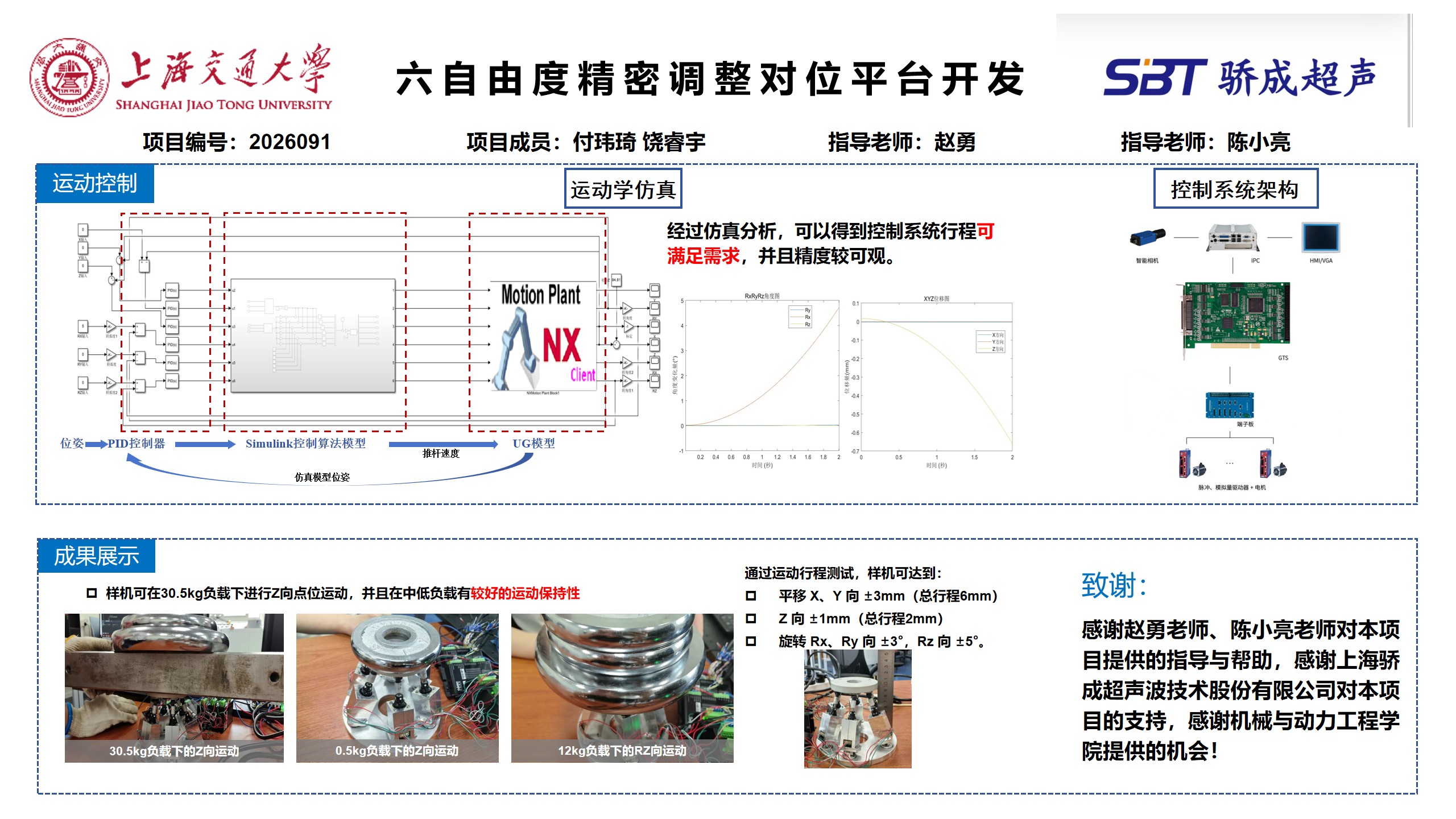
1、机构设计方面:完成了紧凑型6‑UPS平台的全参数化设计,自主定制微型虎克铰解决了小空间铰链布置难题。UG运动学仿真获得理论行程6.46 mm;ANSYS静力学分析显示30 kg负载下最大等效应力29.7 MPa,安全系数9.29,最大变形7.03 µm,满足强度与刚度要求。
2、控制系统方面:选用固高GTS-800-PG-PCIe-00运动控制卡及配套端子板,开发了C#/WinForms三层架构上位机软件,实现了逆运动学解算、多轴同步启动及实时状态监控功能。
3、样机调试方面:完成了样机机械装配与电气集成,通过硬件连通性检查、软件功能验证及基本运动控制测试,成功实现单轴点动与六轴同步点位运动;负载测试验证了2~30 kg范围内的运动能力。




